环形链表 II
题目
给定一个链表,返回链表开始入环的第一个节点。 如果链表无环,则返回 null。
为了表示给定链表中的环,我们使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始)。 如果 pos 是 -1,则在该链表中没有环。
说明:不允许修改给定的链表。
示例 1:
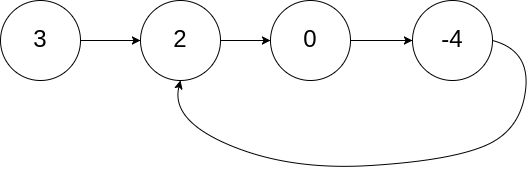
输入:head = [3,2,0,-4], pos = 1
输出:tail connects to node index 1
解释:链表中有一个环,其尾部连接到第二个节点。
示例 2:
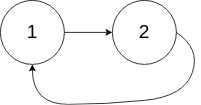
输入:head = [1,2], pos = 0
输出:tail connects to node index 0
解释:链表中有一个环,其尾部连接到第一个节点。
示例 3:
输入:head = [1], pos = -1
输出:no cycle
解释:链表中没有环。

题目分析
这个问题是典型的快慢指针问题,建立一个quick和slow指针,quick指针每次走两步,slow指针每次走一步,如果有环,slow和quick会相遇,否则无环。当quick和slow指针相遇时,这时quick指针变成head,slow不变,quick指针重新向前走,这时quick指针每次走一步,当和slow再次遇到的时候,这个节点就是环的入口。
源代码
/*** Definition for singly-linked list.* struct ListNode {* int val;* ListNode *next;* ListNode(int x) : val(x), next(NULL) {}* };*/
class Solution {
public:ListNode *detectCycle(ListNode *head) {if(head == NULL) { return NULL;} ListNode* slow = head; ListNode* quick = head; bool circle = false; while(quick != NULL && quick->next != NULL) {slow = slow->next;quick = quick->next->next; if(quick == slow){circle = true; break;}} if(!circle) { return NULL;}quick = head; while(slow != quick) {slow = slow->next;quick = quick->next;} return slow;}
};