3D视觉关键技术与核心问题包括哪些?
前言
很多粉丝在公众号后台留言,不知如何入门3D视觉、3D领域的主线是什么,一些难点该如何解决,有哪些方法,导师新开的3D视觉方向无人指导等等。这些痛点,工坊的许多童鞋都踩过坑,也为大家提出了许多非常有价值的问题和解决思路,涵盖了计算机视觉与深度学习、点云处理、SLAM、三维重建、结构光、双目视觉、深度估计、3D检测、自动驾驶、多传感器融合等多个方向,超详细的问题和资料汇总请移步至【3D视觉从入门到精通知识星球】,一个有点干货的学习社区!
在这里也赠送大家一张星球优惠券,有效期两天,需要的童鞋自取哦~

另外,星球开始逐渐增加3D视觉领域相关视频课程,主要涉及点云处理、结构光、三维重建、6D姿态估计等方向!星球力争打造一个集视频教程、学习文档、源码分享、问题问答、工作推荐为一体的高质量学习交流社区,以下是几个领域视频讲解的主线(部分仍在更新中~)



更多视频:


下面为大家汇总了一些星球内部讨论的话题:
点云处理篇
点云补全有哪些常用的算法?
常用的点云分割算法有哪些?
如何对点云进行线面拟合?有哪些方式?
点云配准的常用方法有哪些?哪一种算法在速度和精度上占优势?
点云的特征提取方式有哪些?有哪些描述子?
……
SLAM
请问现在比较新且效果较好的Visual SLAM /Visual+Inertial SLAM 算法有哪些呢?如果能支持双目RGB或RGB-D的更好!
请问怎么用单目普通相机的slam来做三维重建呢,对比sfm改做何区别比较好?
您好,我想问下视觉惯性vio非线性优化这块,原理不是很懂,想知道他到底做了什么事?
……
三维重建篇
基于图像的三维重建中,由稀疏点云获得稠密点云的原理和实现的技术方式都是什么呢?
可以用MATLAB做基于多视角图片的三维重建吗?就是用SFM+MVS。或者,老师有推荐的建模工具吗?
使用mvsnet做三维重建,在估计自采数据的深度范围时,有合适的取值范围参考吗?
近期,室内三维重建融合语义的开源方案有哪些?
……
姿态估计篇
目前做物体6D姿态估计的网络中,有没有应用深度补全来提升精度以及提升遮挡下的识别效果的呢?
如何自己制作6D位姿估计的深度学习的数据集?
请问谁有论文A method for 6D pose estimateof free-form rigid objects using point pair features on range data 的复现代码?
请问有人有做过基于RGB-D的目标定位和位姿估计?
……
结构光篇
为什么有的格雷码三维重建的方法需要投射水平和竖直条纹呢,而有的只需要竖直条纹呢?
最近研究生导师让我研究一下结构光编码相关的内容,请问您在空间编码和时序编码这两方面,重点是空间编码这边有什么论文或资料推荐嘛?
想请问一下在结构光单目三维重建中有没有不标定投影仪而实现标定的,我目前的课题是由一个高速相机和一个投射光栅条纹的激光器组成的系统,传统逆向标定投影仪的方法不能使用,所以希望大佬们给一些标定上的建议。
我使用的是格雷码+相移编码光栅,在经过解码得到绝对相位后,怎么计算得到深
……
双目视觉篇
一直搞不懂,双目拍得一组的两幅图像,提取特征点、立体匹配、三维重建之后。这一组图片结果与其他组图片结果,用什么方法融合在一起呀?
请问有没有什么经典的双目估计深度的文章可以推荐一下?
双目视觉,对于遮挡区域的视差估计或者遮挡区域的深度补全,有比较新的论文推荐吗?
有没有双目三维目标检测的实战算法?
双目视觉三维重建时,想要获得点云是左右视差图都要用到吗?
……
深度估计篇
请问有没有什么经典的双目估计深度的文章可以推荐一下?
请问深度估计输出的深度值,是点到相机平面的垂直距离,还是到相机镜头的距离?
对于双目深度估计任务端到端,非端到端模式区别在哪里?
有哪些自监督方式的单目深度估计算法?
……
3D检测篇
我想问一下有哪种比较好落地的3D目标检测算法,最后实现的效果是能获取目标的姿态估计这样的效果
基于Lidar点云数据的3D检测算法有哪些?
基于双目和单目的3D检测算法有哪些?
……
自动驾驶与多传感器融合篇
Lidar和Camera的标定方式和工具有哪些?
Lidar和Radar的标定方式有哪些?
多相机标定方式有哪些?
……
什么是知识星球?
知识星球是一个高度活跃的社区平台,在这里你可以和相同研究方向的小伙伴一起探讨科研工作难题、交流最新领域进展、分享paper资料、发布高质量的求职就业信息,当然还可以侃侃而谈,吐槽学习工作生活。
3D视觉从入门到精通知识星球
这是国内最大的3D视觉领域学习交流的社区平台,目前已有近2000名活跃的成员,主要涉及3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、缺陷检测、视觉产品落地、视觉竞赛、硬件选型、学术交流、求职交流等领域。星球内部汇集了众多实战问题(相信一定能帮你少走很多弯路),以及各个模块的学习资料:论文、书籍、源码、视频等。
针对小白,星球推出了学习路线,能够帮助新人逐渐进阶学习,我们的vip群更是营造了良好的学术交流环境。
针对需要进阶的童鞋,星球汇总了大量的前沿技术资源,相信这些内容一定能够帮助到个人的成长发展。
星球的成员组成
星球汇集了国内外各个高校的研究生、博士生,包括但不限于清华大学、上海交通大学、华中科技大学、武汉大学、南京大学、北京理工大学、北京航空航天大学;以及国外留学的小伙伴,主要就读于南加州大学、墨尔本大学、慕尼黑工业大学、亚琛工业大学等。除此之外,还有很多一线工作的算法工程师、开发人员,包括但不限于百度、旷视、华为、奥比中光、云从、阿丘科技等。
星球的主要嘉宾
「3D视觉从入门到精通」知识星球是一个技术社区,在这里你可以讨论任何3D视觉相关的难题、前沿技术。星球邀请了国内外高校博士(北航、南加州大学、慕尼黑工业大学等)、CV独角兽公司CTO/CEO、以及各大厂的算法工程师解惑。在这里,你可以一对一和大佬交流,提出自己在工作学习上的疑问。
合作企业
知识星球现已和众多公司建立了良好的合作关系,公司内的算法负责人会不定期的来内部进行前沿技术/产品分享,除此之外,星球也为公司推荐合格的算法/开发人才。现有合作企业包括但不限于:华为云、腾讯、图漾科技、镭神智能、中科慧眼、INDEMIND、迁移科技、追势科技等~
为什么给大家推荐「3D视觉从入门到精通」知识星球呢?
下面先简单以几张图片总结星球的主要内容:

「3D视觉从入门到精通」知识星球
星球是目前唯一以3D视觉系统化学习为主题的高质量知识星球,目前已经有近3000个小伙伴进入学习。主要有以下几个亮点:
1、星主及合伙人共同答疑。星球的合伙人先后就职于国内知名研究机构、自动驾驶公司、海康研究院,主要研究方向为深度学习、目标检测、语义分割、图像处理、自动驾驶感知算法,同时也是CSDN博客专家。星主先后任职于国内知名研究院、知名大厂,一直致力于3D视觉算法、VSLAM算法的开发,涉及相机标定、手眼标定、结构光视觉、点云后处理、编程优化等相关领域的研究。对于星球里的提问,将由星球和合伙人协同作答,星球成员一起探讨,直至得到最佳解。
2、技术介绍不枯燥、详细且有趣。该系列以最基础的知识开始介绍,单个帖子介绍一个具体的知识点,尽量做到图文并茂,生动有趣,并将结合视频课程,对3D视觉的每个重要技术细节一点点深挖。平时再忙没关系,业余时间可以反复观看。(从加入起,有效期一年,到期后,之前已发布内容仍可查看)。
3、技术内容重实践、实操性强。笔者及合伙人会根据不同的知识点设计一些可实践性的练习题,俗话说,实践出真知,只有在实践中获得的认知才是最真切的,假以时日,高效提升解决问题的能力才是王道。
4、精选3D视觉项目常见问题。3D视觉理论到产品落地,这中间会涉及方方面面的细节问题,比如编程优化加速、相机硬件选型、编程工具等,这些是一个优秀开发者需要具备的综合技能。笔者与合伙人会结合各自的项目经历做定期分享,帮助大家提升综合能力。
5、高质量的交流、讨论、学习社区。星球内所有成员都可以进行发布问题、分享知识、上传资源、点赞、留言、评论等操作。对于小伙伴提出的问题,我们大家皆可以参与交流、讨论。所有的交流讨论及问题、资源分享等,星主都将会定期整理,方便日后快速查询。小伙伴们在学习或者项目中遇到问题都可以在星球里免费提问,星主看到后及时答疑解惑。
尾注
1、 新进星球的同学请查看置顶帖子「内容快速导航」,尽早跟上节奏。我们将隔一段时间对星球里的知识点和帖子进行整理,更新,所以大家务必请关注置顶帖子。
2、 本课程的优势:
非常完善的3D视觉学习路线,逐步攻克3D视觉中的每个重要知识点。鉴于星球里截止目前已经分享了近2000+个干货帖子,涉及SLAM、三维重建、3D深度学习、多传感器融合、双目视觉、多视图几何、图像处理、编程调试技巧、点云后处理、针孔模型及鱼眼镜头标定、读书心得、项目实战、招聘需求等,以后会不间断增加其他知识点,减少知识盲区。
对于择业、研究方向选择等问题,星球里都可以免费提问,让你进一步避免踩坑。
知识星球需付费,越早越优惠。学习切忌单打独斗,一个优质的学习圈子助你快速入门、高效解决问题,少走弯路。只要每天不到几毛钱,即可把握住时代的风口,与优秀的小伙伴一起交流、进步,为就业增添砝码。
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款

圈里有高质量教程资料、可答疑解惑、助你高效解决问题
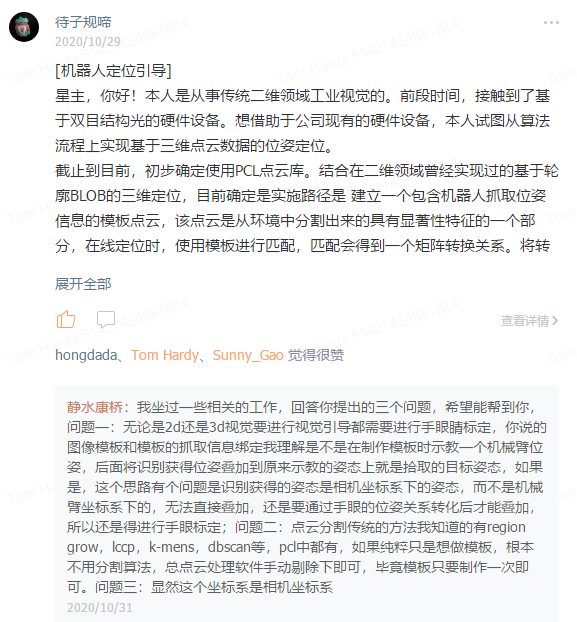
下面是星球内部交流讨论部分截图:








如果没有考虑好是否加入星球也没关系,可以关注公众号「3D视觉工坊」,公众号里也有大量的3D视觉相关的高质量文章,都可以无限次免费阅读~
备注:加入星球后,可获取星球独家学习视频,添加小助理微信,即可邀请进vip学习群。

▲长按扫码即可加入学习三维重建、三维点云、机械臂抓取、
相机标定等课程,且可随时向嘉宾们提问

▲长按加客服微信,咨询更多